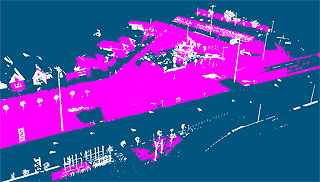
 Real-Time Robotic Perception: Balancing Computational Latency and Geometric Fidelity The case study indicates that VRMesh can reduce point cloud density by up to 99%, while preserving acceptable mesh accuracy and segmentation reliability. This makes it a practical solution for real-time robotic perception and other applications requiring efficient, large-scale data processing. Read More |
|
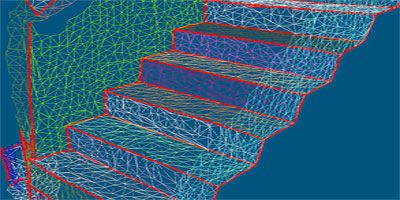
 Point Cloud-to-Mesh Accuracy This case study evaluates point cloud-to-mesh conversion accuracy in VRMesh using datasets from 50M to 3M points. Distance analysis shows how mesh detail decreases with lower point density while overall geometry maintains high accuracy. Read More |
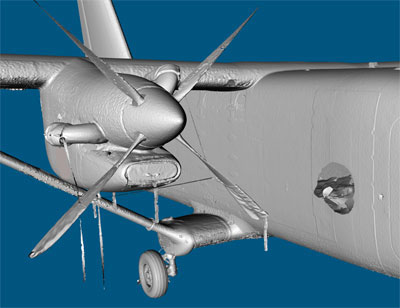
 Prepare Point Clouds for Digital Twins This article demonstrates how to clean noisy point clouds and create accurate digital twins in VRMesh. Remove redundant points, detect surface points automatically, generate optimized meshes, and segment models for engineering applications. Read More |
|